title: 顺滑地进入群论 Ep.2 U(1) SO(2) SO(3) SU(2)
permalink: https://zhuanlan.zhihu.com/p/641253805
author: Laqrymal
author_id: 91afa1e63557c5890615522c1d33ae89
column: 顺滑物理
column_id: c_1620751001228718080
voteup: 296 赞同
created: 2023-07-04T12:12:36
updated: 2024-04-15T11:38:59
fetched: 2024-05-16T08:48:10
count: 约 6634 字
version:
tags:
- 群论
- 物理学
- 理论物理
- Laqrymal
- 顺滑物理
url: https://zhuanlan.zhihu.com/p/641253805顺滑地进入群论 (Ep.2) ——U(1), SO(2), SO(3), SU(2)
from 专栏 顺滑物理
话题:
群论, 物理学, 理论物理, Laqrymal, 顺滑物理
正文:

引言 Introduction
在上一篇文章中,我们初步认识了一些群的基本概念. 由于是写给物理系学生快速入门的,我就不在一步步搭建体系上停留太久了. 我会在这篇文章中直入主题,介绍物理上常见且重要的几个群,便于读者对群的概念加深印象.
如果你对标题中提到的几个群已经比较熟悉,你可以直接略过本篇的大部分内容 (并点个赞同),阅读下一篇关于李群和李代数的内容.
本篇数学略多.
Obsidian LaTeX 没有自带的 \bm 见 Bold matrices and vectors in LaTeX equation - Basement - Obsidian Forum
简易方案是文内增加一个
$$
\newcommand{\bm}[1]{\boldsymbol{#1}}
$$
代码, 于是该文章里的 \bm 就有效果了,
且之后其他文章里也有效果...
我看同帖子里, 后来有人写了插件, 未测试
二维旋转 Two Dimensional Rotations
O(2) Group
我们首先考虑的第一个例子非常直观. 对于一个向量来说,我们有一个二维旋转操作,它可以被写为一个
除此之外,还有镜像翻转的操作:
以上这些操作,再加上矩阵的乘法,我们就构建了一个群1. 以上的这些操作可以归结为 “所有保持任意向量长度不变” 的操作. 但进一步想想,在我们不知道上面这三个变换长什么样的时候,我们要如何判断这种变换的性质呢?我们下面用一种比较抽象的方法来分析一下:
假如我们考虑的向量是
也就是说,要让向量的长度保持不变,一个操作必须满足条件
SO(2) Group
有时候,我们并不关心
在数学上,要做到这一点很简单,只需要对
那么我们总结一下,一个二维旋转
U(1) Group
为了描述二维旋转,除了使用向量外,我们还可以使用一个模长为
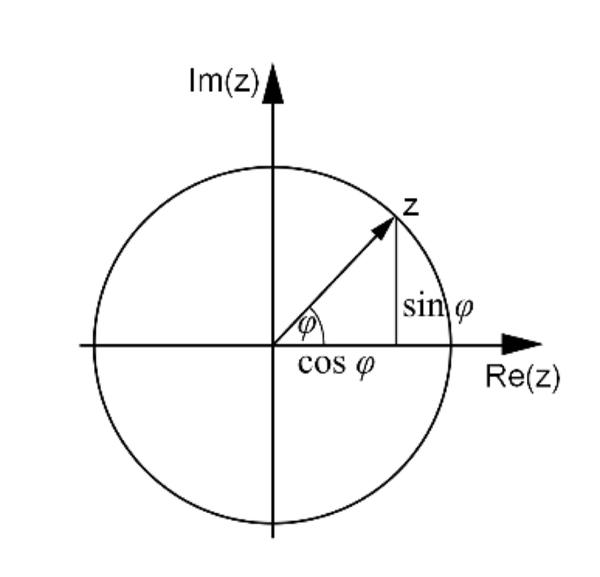
图1: 复平面上的单位圆
因此复数
为了更清楚地将复数表示和前文
所以复数
这个单位复数表示的操作,我们记作
三维旋转 Three Dimensional Rotations
SO(3) Group
群是三维的旋转群,它的定义和
四元数 Quaternions
和二维旋转类似,我们希望用一个“高维复数”来表示三维旋转. 在二维情形中,由于旋转只需要由一个旋转中心确定,所以我们使用的复数只有一个虚部
SU(2) Group
类似地,我们还可以用矩阵和矩阵乘法等价地表述这个群. 由条件
SU(2) and SO(3)
直觉上,
为了说明
首先,我们考虑一个用四元数表示的向量
为了更清晰地说明这两个群的关系,我们将一个任意的单位四元数写为
下期传送门
推荐阅读 Recommended Bibliography
^ Sadri Hassani. Mathematical Physics: a modern introduction to its foundations. Springer-Verlag, 1998.
^ J. J. Sakurai, Jim Napolitano. Modern Quantum Mechanics. Cambridge University Press, 2021.
^ Jakob Schwichtenberg. Physics from Symmetry. Karlsruhe, Germany, 2015.
[5]: 可以自己做一下math work,难度不大.
[6]: 只有这样才能保证变换后的向量仍然只由i,j,k表示,而不会出现纯实数分量.
[7]: 伏笔回收.
评论:
非平凡的理想: SU(2)与SO(3)的关系那一段 ,“它们就相等了”应该是少了个“不” (4 赞)
第一个生命的萌芽: 确实是很顺滑的文章 期待下一篇 (3 赞)
兔葵燕麦: 感觉很浪费时间,不如直接去看Maki -- #comment Maki的完美算术教室的个人空间-哔哩哔哩视频 官网不显示任何内容
Laqrymal -> 兔葵燕麦: 感觉很浪费时间,不如不读这篇文章不评论 (14 赞)
ForkKILLET -> 兔葵燕麦: 所以说一粉胜十黑😳😳
知乎用户: 标题读成了 有一说二🐕 (1 赞)
firearasi: 我读书的时候有这种科普就好了[酷] (1 赞)
palm pre: 再介绍一下李群呗
Laqrymal -> palm pre: 下一篇就是李群了 (1 赞)
良生: 真的顺滑!!!!感谢!!!!!
知乎用户: 催更
阿傩的病灶: 太清晰了!哥![大哭]终于有点概念了
mnbqwerxdezdt: 为什么这种文章的上面都要有一个美少女?